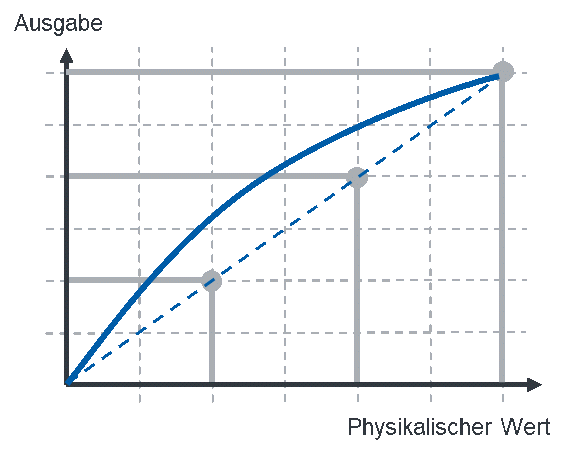
Ein System ist linear, wenn seine Übertragungsfunktion mathematisch mit einer Geradengleichung beschrieben werden kann. Seine Kennlinie weist dann die Form einer Geraden auf. Systeme mit nichtlinearer Kennlinie können z. B. folgendes Verhalten aufweisen:
Nichtlineares Verhalten wird über die Umkehrfunktion korrigiert. Weist ein System z. B. eine Kennlinie der Form y=m∙x2 auf, dann wenden wir in der digitalen Signalverarbeitung im Mikrocontroller eine Wurzelfunktion auf das Ergebnis an. Im Quellcode sieht das folgendermaßen aus:
Linearisierter_Wert = SQRT (Steigungs_Kompensierter_Wert)
Der Term SQRT steht hier für die Wurzelfunktion. Die Herausforderung besteht darin, die Funktion der Kennlinie zu ermitteln, und dann eine Umkehrfunktion zu finden. Dabei helfen in Excel und Matlab Toolboxen, die mit SPLINE-Algorithmen derartige Probleme lösen.
Weiter