Die Steigung einer Kennlinie kann von der gewünschten Steigung abweichen. Dann steigt die Abweichung mit der physikalischen Größe an. Mathematisch wird sie durch den Parameter m in der Geradengleichung y = m ∙ x + b beschrieben.
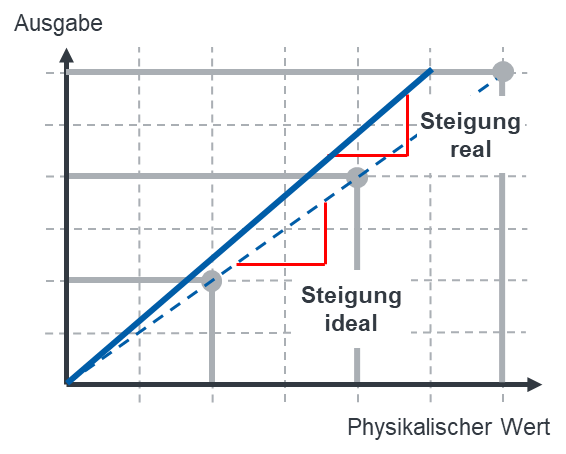
Um eine falsche Steigung zu kompensieren muss vorher der Offset kompensiert worden sein. Ist die Steigung zu hoch, müssen wir die Ausgabegröße mit einem Faktor kleiner als 1 multiplizieren. Ist die Steigung zu klein, ist der Faktor größer als 1. Eine Multiplikation mit dem Faktor 1 lässt die Funktion unverändert.
Um die Steigung zu bestimmen legen wir auf die Waage eine Testmasse, deren Wert wir genau kennen (z. B. 10kg). Wichtig ist hier, dass der Offset vorher korrigiert worden ist. Zeigt die Waage dann z. B. 11kg an, müssen wir den Ausgabewert um den Faktor 10/11 korrigieren. Im Quellcode eines Mikrocontrollers benötigen wir die Befehlszeilen
Offset_Kompensierter_Wert = Unkompensierter_Wert – Offset
Steigungs_Kompensierter_Wert = Offset_Kompensierter_Wert ∙ Faktor
Den Faktor bestimmen Sie aus der Formel
Ich gehe davon aus, dass bei den folgenden Fehlern in Kennlinien Offset und Steigung bereits kompensiert sind.
Weiter