Diskrete Regler werden für Aktoren eingesetzt, die an ihrem Eingang keine kontinuierlichen Werte verarbeiten können. Ein Beispiel ist ein Heizkörper, der nur ein- und ausgeschaltet werden kann, dessen Heizleistung also nur die Zustände Vollgas oder Aus kennt.
Bei einer 2-Punkt-Regelung wird ein solcher Aktor mit einem Signal angesteuert, das nut zwei Zustände kennt. Das sind in der Digitaltechnik üblicherweise „HIGH“ und „LOW“. Bei einer Ansteuerung mit LOW ist der Aktor aus, bei HIGH ist er an.
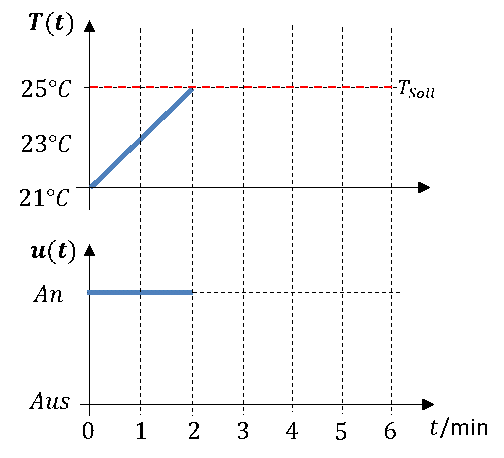
Der Regler ändert seinen Ausgangswert immer abhängig von der Regelabweichung an seinem Eingang. Bei diskreten Reglern werden Schwellwerte definiert, die mit dem Eingangssignal verglichen werden. Die Funktionsweise ist an einem Beispiel einfach nachvollziehbar. Wir betrachten dafür eine Temperaturregelung in einem Raum. Die Temperatur des Raums beträgt zu Beginn 21°C. Sie soll mit einer Heizung, die nur die Zustände u = AN und u = AUS kennt, auf 25°C geregelt werden. Zunächst muss die Heizung dafür einige Zeit lang AN sein. Die Raumtemperatur steigt dadurch über der Zeit t an, bis die sie den Sollwert von 25°C erreicht.
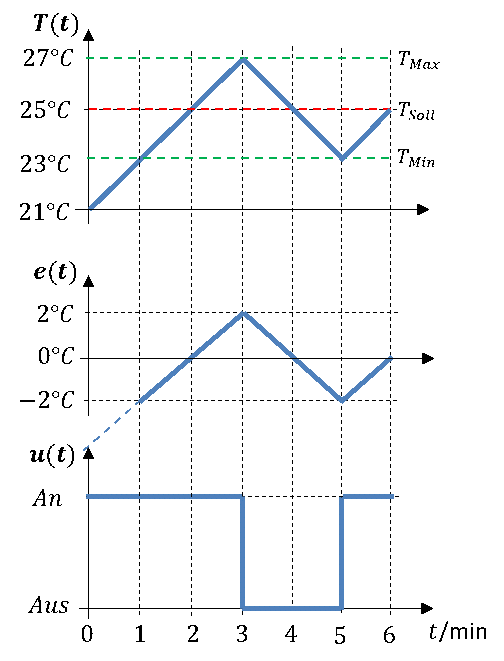
Wenn die Heizung jetzt weiter AN bleibt, steigt die Temperatur über den Sollwert an. Wenn wir die AUS-schalten, sinkt sie wieder unter den Sollwert. Deshalb definieren wir zwei Grenzwerte für die Temperatur, die wir um den Sollwert herum auf 23°C und 27°C legen. Wenn die Temperatur die obere Grenze von 27°C überschreitet, dann wird die Heizung AUS-geschaltet. Unterschreitet sie die 23°C, wird die Heizung wieder AN-geschaltet. Es stellt sich folgendes Verhalten ein:
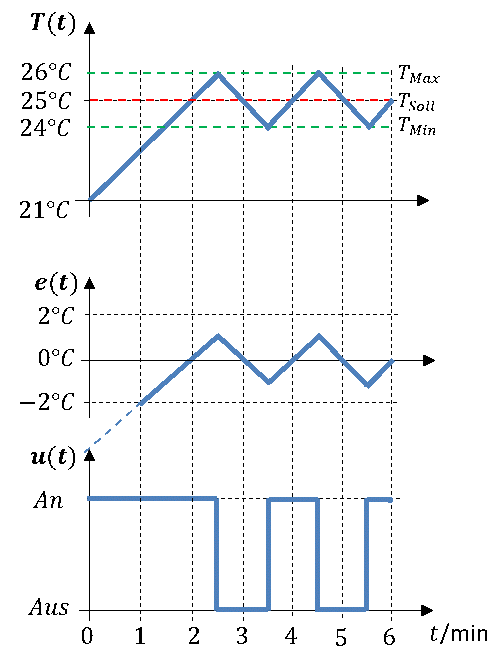
Die Grenzwerte können auch enger um den Sollwert herum gesetzt werden. Dann ist die Regelabweichung geringer. Allerdings muss der Aktor dann häufiger Schalten. Die folgende Abbildung zeigt das Verhalten für eine halb so große Regelabweichung:
Oft ist ein Aktor nur für eine bestimmte Anzahl von Schaltzyklen gebaut, er geht an zu häufigem Schalten schneller kaputt. Deshalb müssen wir einen Kompromiss aus Lebensdauer und Regelabweichung finden.
Sie können auch Aktoren, die eine kontinuierliche Ansteuerung verarbeiten können, diskret ansteuern und mit ihnen ein diskret geregeltes System aufbauen. Das ist i. A. deutlich einfacher als einen kontinuierlichen Regler auszulegen. Allerdings muss die Applikation zulassen, dass die Regelgröße ständig um die Führungsgröße herum schwankt, ohne dass es einen eingeschwungenen Zustand gibt.
Weiter