In beiden Beispielen im vorherigen Kapitel wirkt die Störung vor dem Integrator, also links vom Integrator. In der Praxis wirken Störungen oft vor dem Integrator der Regelstrecke. Das hat Auswirkungen auf die Störunterdrückung. Betrachten wir dazu die Geschwindigkeitsregelung.
Um die Störunterdrückung zu untersuchen, bauen wir das System in einen Regelkreis mit einem P-Regler mit kPR = 1 ein. Nehmen wir zur Vereinfachung für den Motor als Aktor ein P-Verhalten mit kPA = 1 an. Den Faktor 1 / m vereinfachen wir mit m = 1 zum Streckenverhalten kPS = 1. Um die Störunterdrückung zu berechnen, setzen wir w = vSoll = 0.
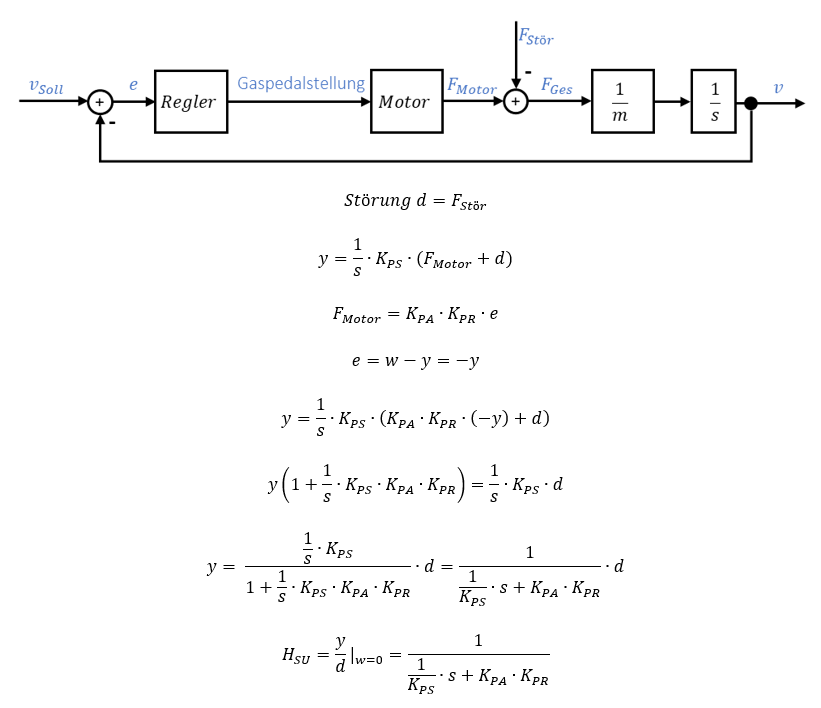
Die Störunterdrückung im eingeschwungenen erhalten wir mit s = 0. Damit gilt:
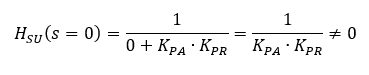
Es bleibt eine Regelabweichung im eingeschwungenen Zustand, obwohl ein Speicher im System verbaut ist. Beim Führungsverhalten gilt, dass die Regelabweichung immer gegen 0 geht, wenn ein Speicher in A enthalten ist. Warum ist das so?
Weiter