Systeme mit nicht schwingfähigem PT-2-Verhalten weisen eine Dämpfung größer oder gleich 1 auf. Ein einfaches Beispiel besteht aus der Reihenschaltung zweier PT-1 Funktionsblöcke. Diese sind nicht in einem Regelkreis eingebunden, sondern sie werden ungeregelt betrachtet. Im folgenden Beispiel werden zwei PT-1 Blöcke mit τ = 1 und Kp = 1 hintereinandergeschaltet:
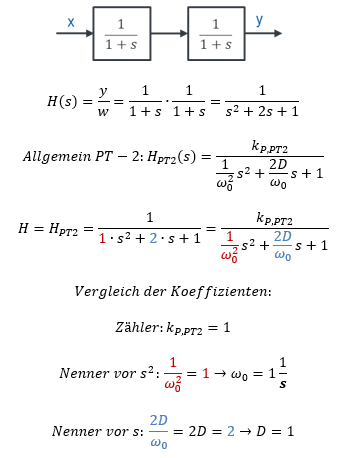
Die Dämpfung D weist den Wert 1 auf, damit schwingt das System gerade so nicht. Weil es nicht schwingt, ist der Wert der Resonanz-Kreisfrequenz ω0 irrelevant. Es gibt hier zwar einen Zahlenwert, aber eben keine Schwingung. Wir erkennen noch auf eine andere Weise, warum das System nicht schwingen kann. Dafür setzen wir s = jω und betrachten den Nenner:

Der Nenner kann nicht 0 werden. Entweder wird nur der Realteil zu 0 für ω = 1 (grün). Oder es wird nur der Imaginärteil zu 0 für ω = 0 (orange). Es gibt keine Kreisfrequenz ω, bei der der ganze Nenner zu 0 wird. Deshalb kann dieses System nicht schwingen. Die Sprungantwort eines Systems mit nicht schwingendem PT-2-Verhaltens sieht folgendermaßen aus:
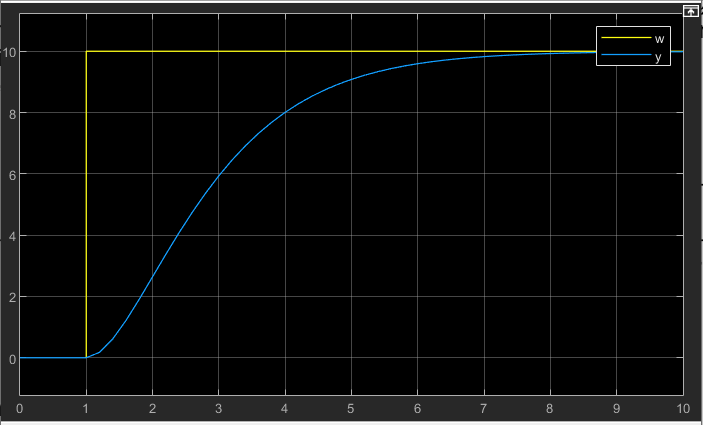
Diese Sprungantwort sieht der eines Systems mit PT-1-Verhalten sehr ähnlich. PT-1 Verhalten und nicht schwingendes PT-2 Verhalten können in der Sprungantwort nur dadurch unterschieden werden, dass beim nicht schwingenden PT-2 Verhalten der Ausgang direkt nach dem Sprung stetig bleibt. Es gibt keinen Sprung nach oben, sondern einen weichen, stetigen Übergang.
Die Parameter solcher Systeme sind aus der Sprungantwort heraus schwer zu ermitteln. Dafür bietet sich z. B. das Wendetangentenverfahren an, das aus der Sprungantwort charakteristische Parameter bezieht, aus denen direkt Regler-Parameter eines PID-Reglers bestimmt werden können. Das verstehen Sie erst, wenn Sie das Kapitel Regler gelesen haben. Nehmen Sie das erstmal nur zur Kenntnis.
Beim Wendetangenten-Verfahren zeichnen Sie in den Wendepunkt der Sprungantwort eine Tangente. Sie können am Bildschirm auch ein Lineal als Tangente anlegen. Aus der Grafik ermitteln Sie die beiden Zeiten tu und tg so wie in der folgenden Abbildung:
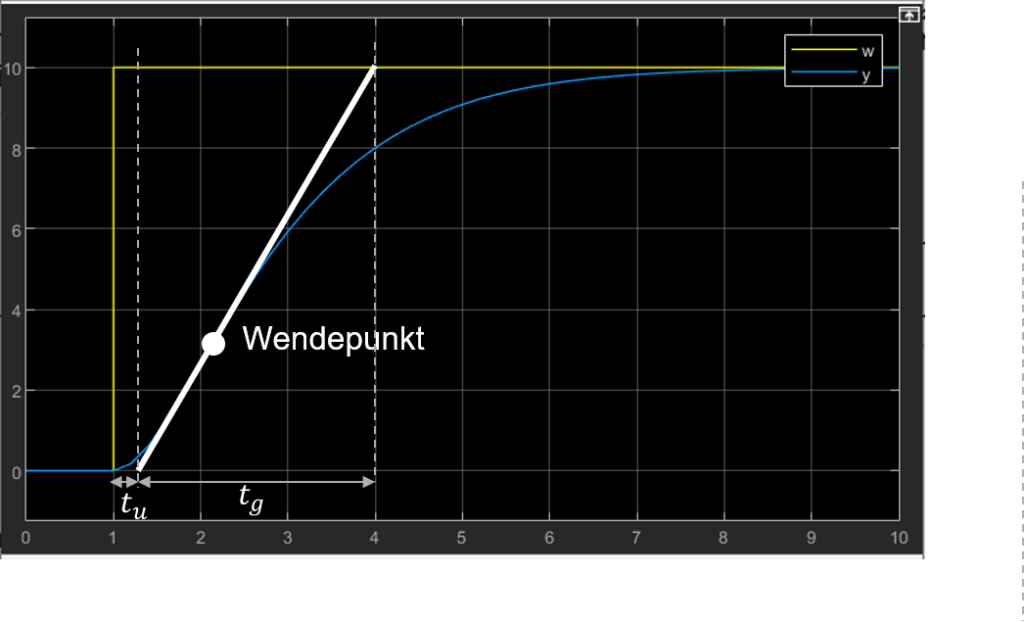
Es gibt Tabellen, aus denen direkt Regler-Parameter entnommen werden können, die aus den beiden Zeiten abgeleitet werden. Das wird hier nicht weiter vertieft. Das Verfahren ist sehr ungenau, denn den Wendepunkt genau zu treffen ist schwierig. Leichte Verschiebungen des Wendepunkts führen schnell zu großen Abweichungen in den ermittelten Zeiten. Leider gibt es kein wirklich gut geeignetes Verfahren zur Charakterisierung eines solchen nicht schwingfähigen PT-2 Verhaltens.
Nicht schwingfähiges PT-2 Verhalten wird üblicherweise über die Parameter tu und tg charakterisiert.
Weiter